
Anders als klassische Fail-Safe-Konzepte nutzt NX NextMotion von Arnold NextG ein fail-operationales Design das Redundanz und Automatisierung vereint. Mehrere ECUs, parallele Datenpfade, SAFE-CAN, Automotive Ethernet und separate Stromkreise gewährleisten bei Ausfällen die nahtlose Weiterführung der Fahrsteuerung. In Extremsituationen wie Glatteis, Aquaplaning oder plötzlichem Hindernisauftritt berechnet das System Reibwerte, Vektoren und Regelgrößen in Millisekunden, passt Lenk- und Bremskräfte dynamisch an und realisiert präzise Gegenmanöver. Fehlerdiagnosen, Isolation und Kompensation sichern optimale Kontrolle jederzeit.
Table of Contents
Automatisierte Stabilitätskontrolle optimiert vorausschauende Lenkung und Bremsmanöver in Echtzeit
NX NextMotion erzielt in Testreihen Reaktionszeiten von unter zehn Millisekunden und übertrifft damit den menschlichen Durchschnitt von 500 bis 800 Millisekunden um den Faktor fünfzig. Die simultane Sensorfusion von LiDAR, Radar und optischen Kameras liefert eine lückenlose 360-Grad-Umgebungserfassung. Automatisierte Stabilitätskontrolle passt Fahrdynamik kontinuierlich an. Parallele Datenverarbeitung vermeidet Engpässe beim Multitasking. Durch regelbasierte und statistisch verifizierte Entscheidungslogik werden emotionale Fehlurteile vollständig ausgeschlossen. Sensordatenfusion und Algorithmenoptimierung garantieren konstante Performance unter allen Betriebsbedingungen.
2oo3-Validierung im NX NextMotion filtert fehlerhafte Signale vor Ausführung
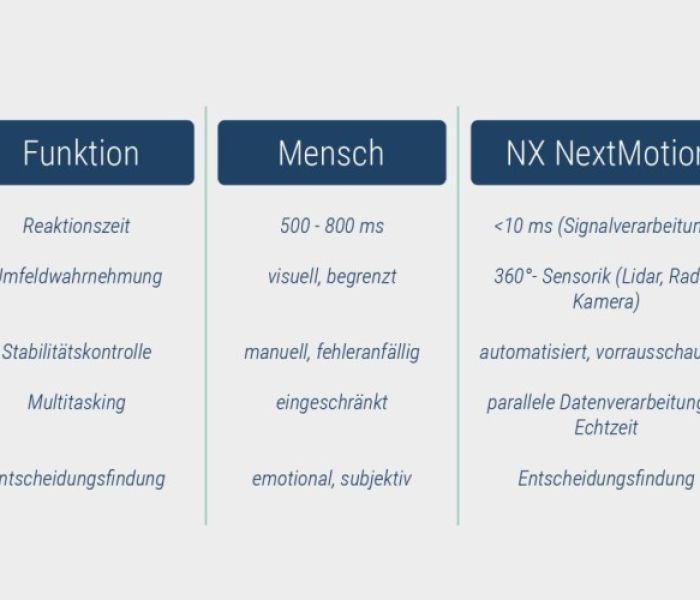
Mensch vs. Maschine im Faktencheck: NX NextMotion überzeugt (Foto: Arnold NextG)
Die sichere Architektur von NX NextMotion verzichtet bewusst auf einfache Notlaufstrategien und implementiert ein fail-operationales Prinzip durch mehrfach redundante Steuergeräte. Im Falle eines ECU-Ausfalls übernehmen andere Module unverzüglich Funktionen zur Lenkung, Bremsung und Stabilitätskontrolle. Kommunikationskanäle wie SAFE-CAN und Automotive Ethernet sind mehrfach abgesichert, um Ausfälle und Manipulationen zu verhindern. Eine 2oo3-Fehlersprachvalidierung verwirft Inkonsistenzen unmittelbar. Getrennte Stromversorgungen für Aktuatoren garantieren eine stabile Energieversorgung selbst bei teilweisem Systemausfall und gewährleisten kontinuierlichen Betrieb.
Fail-operational Architektur isoliert Defekte und gewährleistet jederzeit vollständige Fahrzeugkontrolle
NX NextMotion misst bei Glatteis und Aquaplaning fortlaufend Reibkoeffizienten einzelner Radachsen, stimmt die berechneten Traktions- und Bremskraftvektoren in Echtzeit ab und regelt Lenk- sowie Bremsbefehle automatisiert nach. Taucht ein Hindernis in schneller Vorbeifahrt auf, initiiert das System binnen Millisekunden exakte Gegen- oder Ausweichmanöver ohne Verzögerung oder Überlenkung. Bei Ausfall einzelner Stromkreise oder Aktuatoren trennt die robuste Architektur fehlerhafte Module, aktiviert redundante Einheiten und sichert durchgängig die Steuerbarkeit und maximale Fahrzeugstabilität.
360°-Sensorfusion und redundant ausgelegte Architektur ermöglichen präzise reaktionsschnelle Fahrsteuerung
NX NextMotion übertrifft menschliche Reflexe signifikant, da komplexe Fahrsituationen in unter zehn Millisekunden analysiert und entschieden werden. Eine simultane Auswertung von Kamera-, Radar- und LiDAR-Daten in 360°-Sensorfusion erkundet die Umgebung lückenlos. Fail-operational redundante Steuergeräte und doppelt abgesicherte Datenleitungen verhindern Ausfälle und sichern kontinuierliche Funktionsbereitschaft. Durch statistisch optimierte Entscheidungsprozesse und vorausschauende Stabilitätskontrolle eliminiert das System emotional bedingte Fehlentscheidungen und gewährleistet selbst bei extremen Wetterlagen stets sichere Fahrzeugführung dank umfassender innovativer Fehlererkennung.











